We believe that the potential of edges in local feature detection has not been fully exploited and therefore propose a detector that starts from single scale edges and produces reliable and interpretable blob-like regions and groups of regions of arbitrary shape. The detector is based on merging local maxima of the distance transform guided by the gradient strength of the surrounding edges. Repeatability and matching score are evaluated and compared to state-of-the-art detectors on standard benchmarks. Furthermore, we demonstrate the potential application of our method to wide-baseline matching and feature detection in sequences involving human activity.
|
|
|
|

|
|
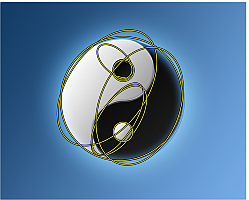
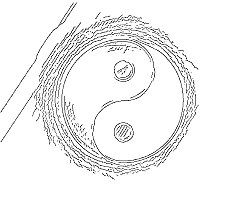
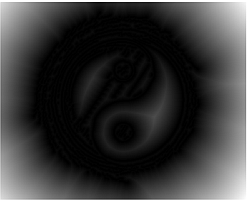
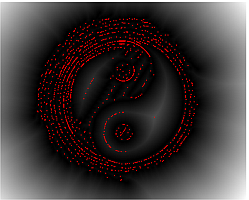
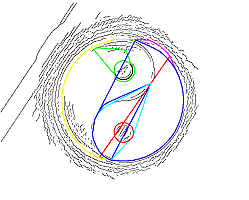
Distance-based detector step-by-step. Feature detection for a yin-yang symbol. Row-wise: detected features, edge map, distance map, local maxima, Delaunay triangulation (Green dots correspond to intersecting points), convex hulls.
 |
|
|
|
|
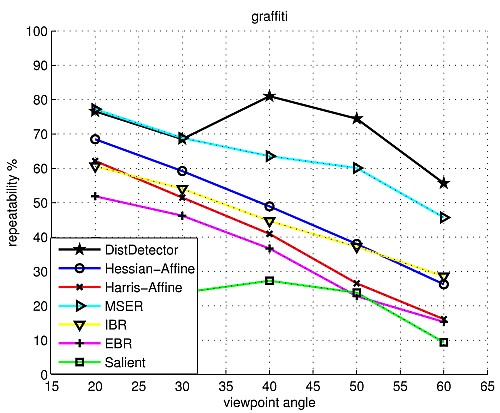
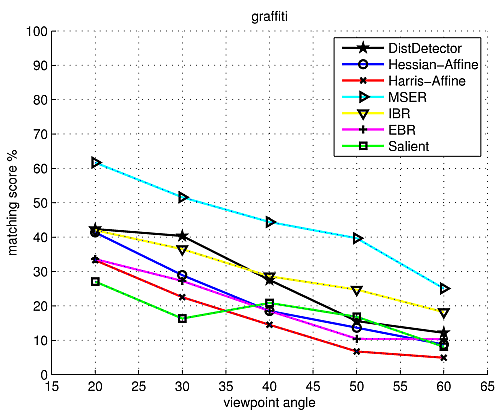
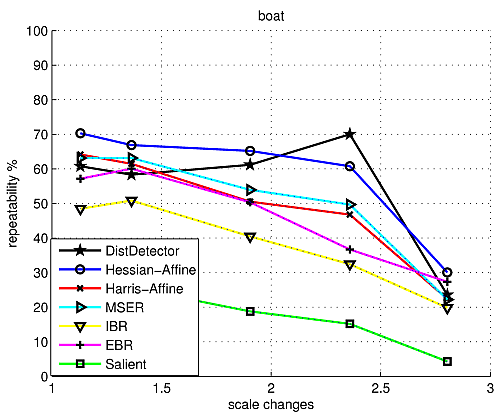
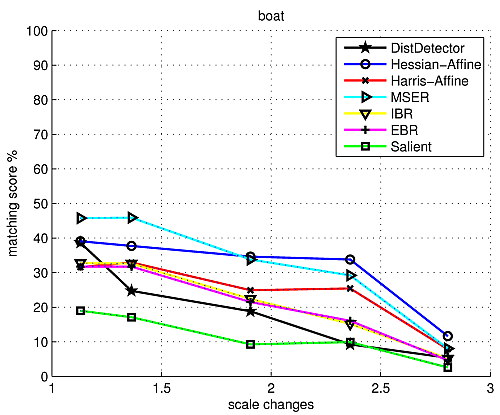
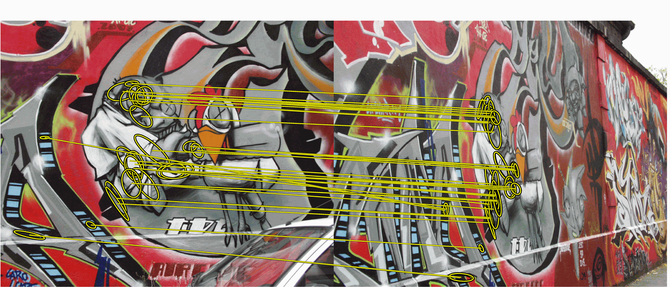
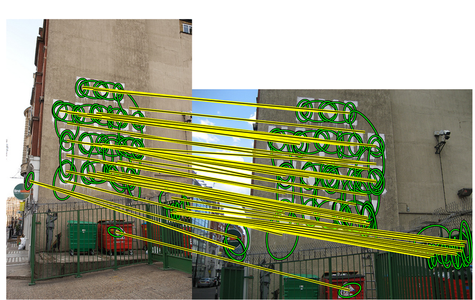
Repeatability score, number of correspondences, matching score and number of correct matches for the graffiti and boat sequences.
|
|
|
|
We have proposed a new feature detector based on single-scale edges. The detector performs competitively on established evaluation benchmarks and produces a compact set of interpretable and repeatable features. Visually, the detected features are more similar to the ones produced by MSER, but exhibit a higher overlap factor, a wider area coverage. The ability to detect composite regions is also very important, in contrast to uniform intensity regions of other detectors. Since all major algorithmic components, namely distance transform, Delaunay triangulation and merging, are still efficient to compute in 3D, it is straightforward to extend DistDetector to spatiotemporal data.