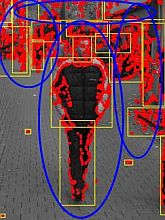
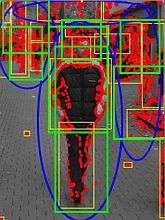
We have proposed an object detection approach which initially considers points of interest to determine meaningful regions.Such points are then grouped according to similarity and spatial proximity criteria. Feature points grouping takes place through an unsupervised clustering approach across a large range of domains generic detector). The overall localization problem is achieved by forming neighborhoods of clusters. The clusters belonging to each neighborhood are checked in combinations to form candidate regions and in turn to assess the exact location of object’s occurrence.The response is estimated in terms of both visual and statistical evaluation.The test sets are produced so as to depict objects at variable scales and poses. Visual inspection illustrated that the proposed methodology provides accurate determination of the object location and extent. Statistical evaluation also verified that the approach has a performance that is comparable to state of the art object detectors. The overall approach has no limitations related to the image size and the object position. The subsequent figures summarizes the operations performed by the detector. The encircled regions indicate the grouped RoIs while the light green rectangles signify combinations of RoIs lying within the same neighborhood.
 |
 |
 |
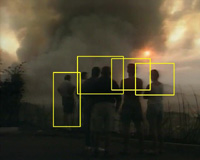
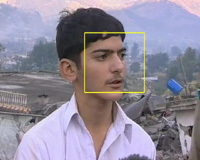
Here we assess the system potential through providing visual and statistical results associated to the detector responce. The test images presented below are selected to illustrate the challenges (occlusion, cluttering) that should be dealt through the detection approach.
 |
 |
 |
The system response was estimated through thoroughly evaluating its potential (1) to determine the exact location of object occurence.
 |
|
 |
|
 |
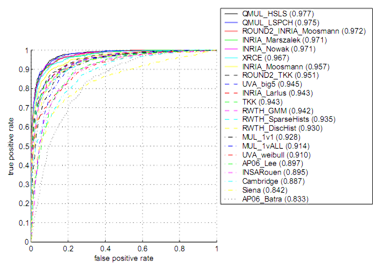 |
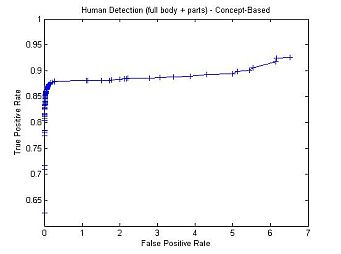
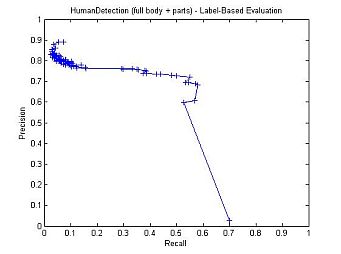
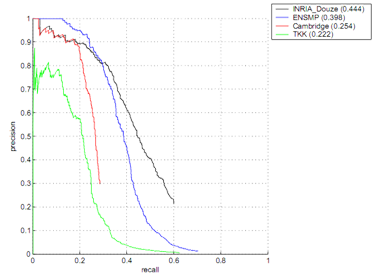
Figures 3(a)-(c) summarize our system performance in the human detection task. More specifically 3(a) depicts the response in the classification task, while (b) and (c) provide an illustration of its performance in the pixel-based and the label-based evaluation respectively. The label-based evaluation is estimated in terms of measuring the trade-off between the system precision and its recall. This was selected in order to provide results that could be directly comparable to the evaluation measures also provided by other evaluation frameworks. A brief comparison between figures 3(a) and 3(d) reveal that our system can be included in the 3 most robust systems in terms of its efficiency to determine the occurrence/ non-occurrence of an object in the image.